- 廠家供應
- 大量現貨
- 可開發票
服務熱線:
18691898759服務熱線:
18691898759
產品分類
Products 更新時間:2025-11-25
更新時間:2025-11-25  瀏覽次數:38
瀏覽次數:38實驗名稱:磁場激勵下對狹窄非結構化液體環境的環境適應性和出色的3D可控性驗證
研究方向:在臨床實踐中,天然孔口通常為醫療器械提供對各種靶組織的侵入性通路。這些體腔/腔(例如泌尿和消化系統)通常充滿液體,并促進物質在體內或體內與體外之間的運輸。與傳統的開放或介入手術相比,生物相容性磁驅動微型軟體機器人可以運輸各種治療藥物,并以非侵入性方式安全地穿越自然孔口,以執行醫療任務,例如靶向藥物輸送和組織診斷。然而,在如此狹窄、充滿液體的環境中安全、可靠和高效地執行醫療任務對機器人的運動性能提出了嚴格的要求。
Carangiform魚可以在復雜的自然水域中高速敏捷地游泳。通過模擬它們的生物形態和運動學特征,研究者設計了一種不受束縛的carangiform狀磁性milliswimmer,能夠在體內發現的狹窄流體環境中進行敏捷的3D抗重力導航。這種毫游泳者產生的身體曲率分布與魚非常相似,使用磁扭矩來驅動其身體,并模仿魚通過肌肉收縮產生扭矩的原理。這種仿生設計為milliswimter提供了類似carangiform的游泳行為和出色的游泳性能。它配備了強大的推力,使其能夠在不依賴輔助浮力結構的情況下進行3D抗重力的水下自由游泳,并在狹窄、彎曲和可變直徑的管道環境中平穩地向上游游泳。此外,這種設計為milliswimter提供了高游泳速度和出色的等效運動性能,U高達20BLs?1,類似于fish的ηU83.49BL毫克?1兆噸?1s?1),這比以前報告的值高出六倍多。此外,這種設計賦予了milliswimmer出色的巡航機動性,使其能夠輕松避開障礙物(具體來說,milliswimmer具有最小的巡航轉彎半徑r把0.05BL和最大巡航轉彎速度ω把高達4737度?1當外部驅動磁場強度保持不變時)。重要的是,這種milliswimter具有很強的環境適應性。由于其高度自由度,它可以靈活地調整游泳泳姿,以適應充滿液體、非結構化、狹窄的環境。像大多數魚一樣,它的負浮力使它能夠適應密度高于水的各種液體環境。在操縱桿控制和自動視覺導航下,milliswimmer表現出出色的可控性,可以在指定位置懸停并在克服重力的同時導航任意3D軌跡。最后,通過結合常見的醫學成像技術,展示了milliswimmer在離體豬泌尿系統中的潛在臨床應用。
實驗目的:通過精確控制磁場的強度和方向,是否可以實現對液體在三維空間中的精確控制,為后續實驗做論證和鋪墊。
測試設備:ATA-6223功率放大器、CCD、數據采集卡、PC、磁力計、磁性產生裝置、微型注射泵
實驗過程:為了模仿魚類的運動學特征,milliswimmer被驅動在水中產生強大的網推力,使其能夠在重力和外部阻力下在三個維度上自由游動。主要是因為它的工作空間更大,適合離體實驗和其他需要這種容量的實驗。然而,較大工作空間系統的高電感需要使用諧振電路來產生足夠的高頻驅動電流。用磁力計(CH-3600)校準系統產生的靜態和動態磁場。該系統主要由一個磁性產生裝置、三個功率放大器(ATA-6223)、一個數據采集卡、一臺PC、三個電荷耦合器件,(CCD)攝像頭和三個鏡頭組成。磁系統可以在空間中產生任何方向的磁場。為了監測毫秒游泳者游泳時產生的流場,采用了PIV技術。中性浮力聚酰胺種子粒子均勻分散在實驗水環境中,用532nm激光照射。使用高速CCD攝像機從側面或頂部記錄粒子的運動,并使用openpiv157對粒子圖像進行分析。使用微型注射泵向彎曲的玻璃管提供流體輸入,通過控制噴射泵的水平推進速度,可以調節彎曲玻璃管入口處的平均流體速度。
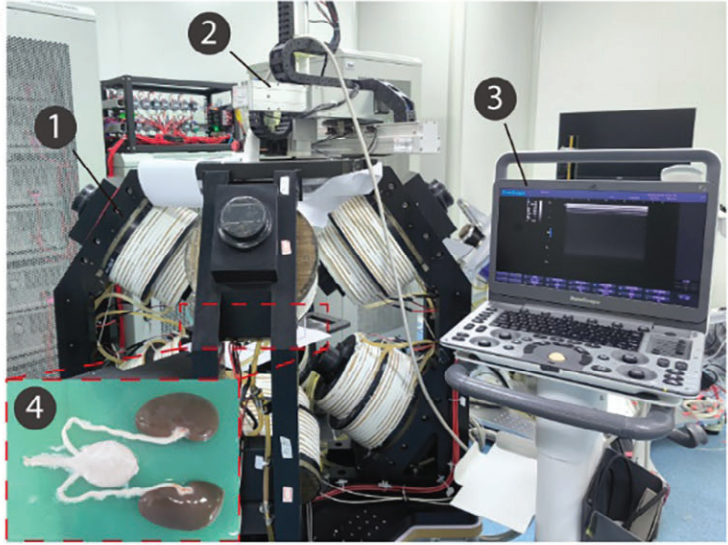
圖1-1微微粒子在離體豬泌尿系統器官中的潛在應用實驗框圖
實驗結果:說明了在恒定的磁場大小和驅動頻率下,毫游泳運動員如何使用由操縱桿控制的不同游泳動作成功導航障礙物并遵循預定義的軌跡,包括“M"、“S"和“R"形狀(MSR)。最初,milliswimter采用模式1游泳,沿著“M"形的軌跡前進(圖1-2b)。當接近水平窄間隙障礙物1(長度2×寬度0.3mm,如圖1-2c的插圖所示)時,milliswimter通過調整滾動角度θ從模式1過渡到模式2輥到90,成功穿過狹窄的水平間隙。隨后,游泳者在這種模式下繼續沿著S形軌跡游泳(圖1-2c)。當接近傾斜的45°窄間隙障礙物2(長度2×寬度0.3mm,如圖1-2d插圖所示)時,毫游泳者調整θ輥到45,成功穿越狹窄的間隙障礙物2。在此之后,通過以滾動頻率f旋轉milliswimmer輥1Hz,它采用模式3并沿R形軌跡向前移動(圖1-2d)。最后,這位毫不費力的游泳運動員從模式3過渡到模式1,毫不費力地避開圓形障礙物并在水中航行。在整個過程中,毫游泳者的平均手動操作誤差為0.45毫米(0.12BL)。
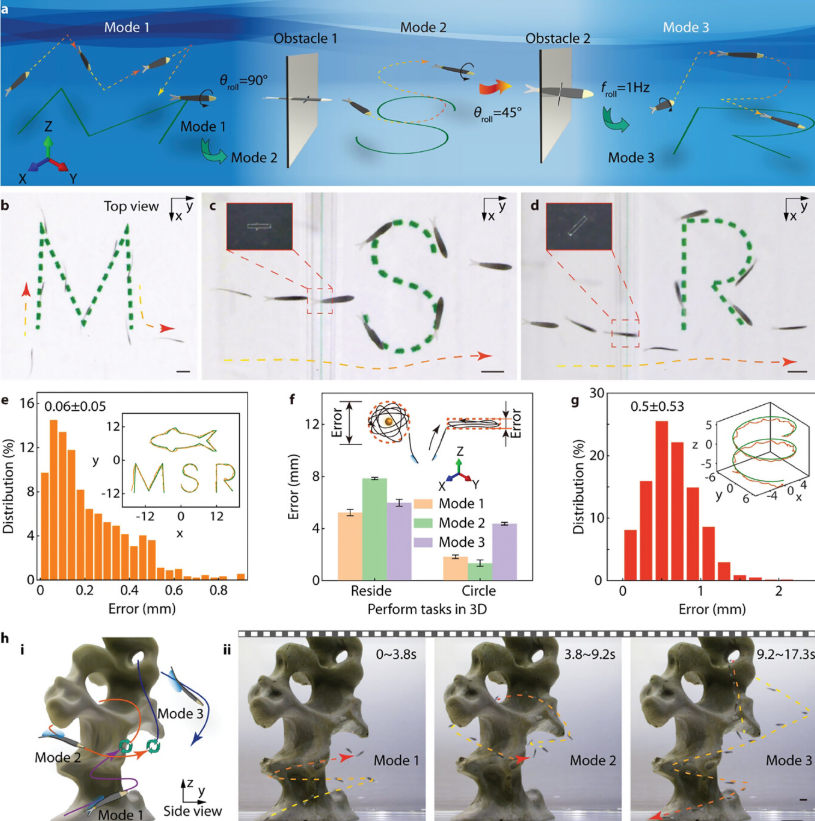
圖1-2milliswimr的可控性和環境適應性。a)毫游泳者平穩地遵循預定軌跡(MSR)并調整其游泳模式以穿過狹窄間隙的示意圖。b)“M"形的軌跡。c)障礙物1,其特征是水平狹窄的間隙(長2毫米,寬0.3毫米,見插圖)和S形軌跡。d)障礙物2,一個45°角的傾斜狹窄間隙(長2毫米,寬0.3毫米,如圖所示)和一個R形軌跡。e)在基于視覺的自動控制下,milliswimter使用三個游泳動作來跟蹤魚形和MSR軌跡。該圖顯示了跟蹤的統計誤差分布。f)在基于視覺的自動控制下,毫游泳運動員可以停留在空間中的指定點并懸停在指定的水平面上,在三個游泳泳姿中的每一次中表現出不同程度的誤差。誤差線表示標準差N=3。g)在基于視覺的自動控制下,milliswimter使用三個游泳動作來跟蹤螺旋軌跡的統計誤差分布。h)通過在三個游泳泳姿之間切換,milliswimter在復雜的3D網絡結構(珊瑚狀)周圍自由游泳的行為。i)milliswimper在3D網絡中游泳的示意圖。ii)毫游泳者在3D結構中連續游泳的視頻快照。比例尺,2毫米。
本資料由Aigtek安泰電子整理發布,更多案例及產品詳情請持續關注我們。西安安泰電子Aigtek已經成為在業界擁有廣泛產品線,且具有相當規模的儀器設備供應商,樣機都支持免費試用。
 我的位置:
我的位置: